

Die erste Exkursion in diesem Semester führte uns zu einer altbekannten Adresse, dem DLR in Oberpfaffenhofen – diesmal jedoch in zwei uns noch unbekannte Institute.
Die erste Station war die Abteilung für Flugexperimente. Diese plant und führt die sogenannten Kampagnen durch, Messprogramme mit den Flugzeugen des DLR. Dazu verfügt das DLR über Europas größte Flotte an Forschungsflugzeugen. In Braunschweig kümmert man sich um die Versuche am Flugzeug, die Kollegen in Oberpfaffenhofen über die Forschung mit dem Flugzeug.
In erster Linie wird mit dieser Flotte Erdbeobachtung und Atmosphärenforschung betrieben. So waren zum Beispiel beim Ausbruch des (unaussprechlichen) isländischen Vulkans Eyjafjallajökull die Flugzeuge des DLR die einzigen Jets am gesamten Himmel Europas. Um diese Mission zu erfüllen, sind in Oberpfaffenhofen mehrere Flugzeuge stationiert. Neben der altgedienten Dassault Falcon 20E, die schon seit 40 Jahren für das DLR Atmosphärenforschung betreibt, gibt es noch eine Dornier Do-228, die primär zur Erdbeobachtung mit Radarsensoren verwendet wird. Das Kronjuwel in Oberpfaffenhofen ist jedoch eine umgebaute Gulfstream G-550, genannt HALO. Diese Spezialanfertigung ist in der Lage bis zu 10 Stunden lang in einer Höhe von bis zu 15km atmosphärische Messungen durchzuführen und damit nahezu einzigartig auf der Welt. Diese Kampagnen führen die HALO immer wieder rund um den Globus, von Europa mitten über den Atlantik bis nach Taiwan. All diese Flugzeuge konnten wir uns aus der Nähe ansehen und Fragen stellen. Auch vor Ort ist die Cessna Caravan, der „fliegende Hörsaal“, bei dem auch Studenten der TUM im Rahmen der Summer School des DLR und der Uni Braunschweig teilnehmen können. Für mehr Infos dazu einfach am Ende des Sommersemesters nach den Plakaten Ausschau halten.
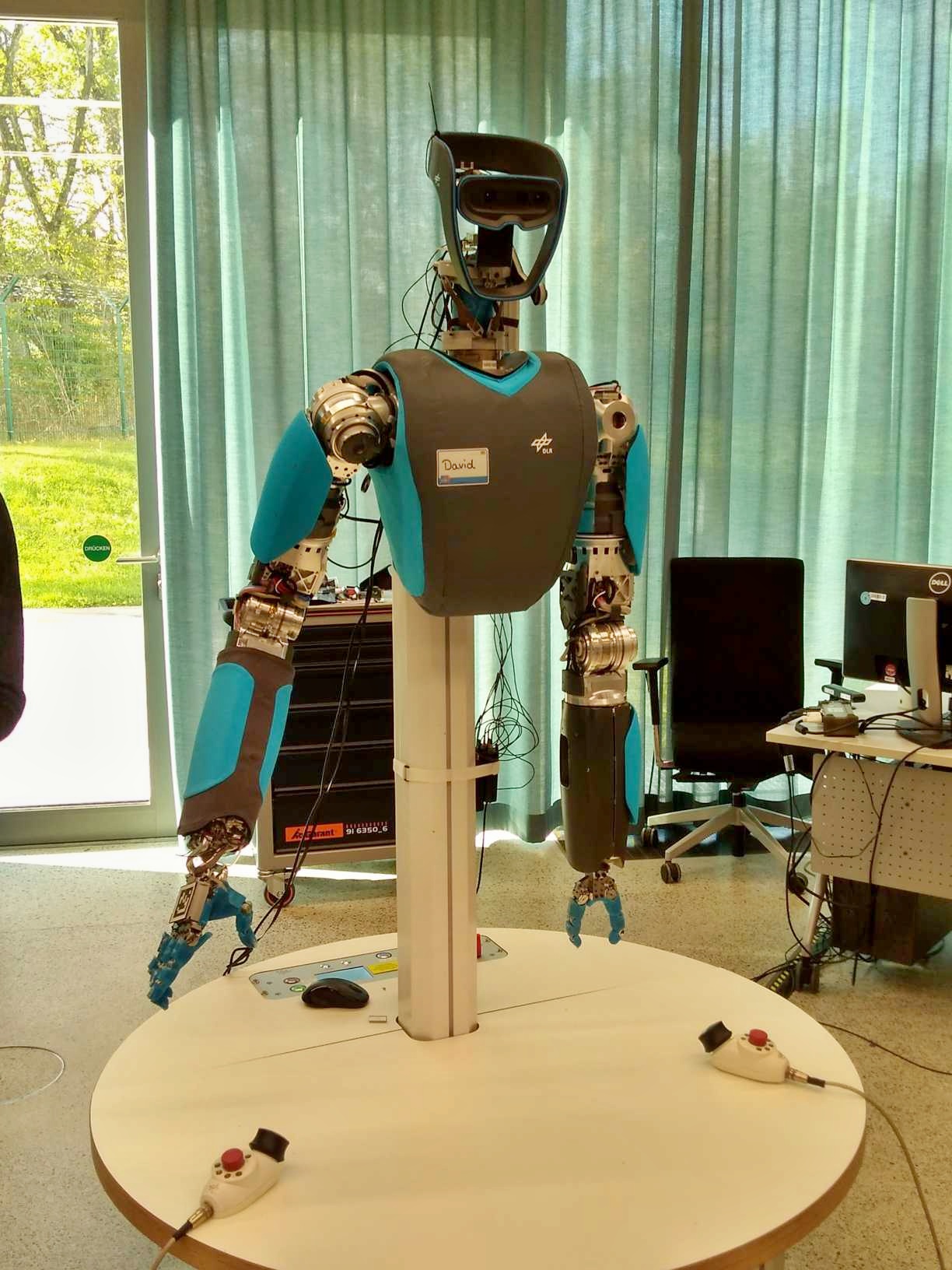
Die nächste Station war am Institut für Robotik und Mechatronik (RMC). Zuerst wurden wir von Herrn Muskardin abgeholt, der sich bereit erklärt hatte, uns das Institut genauer zu zeigen. Die erste Station war ein Laufroboter, der durch Torque Control gesteuert wird. Das heißt, dass nicht die Position, sondern das Drehmoment des Roboters geregelt wird. Daneben kann er auch selbstständig stehen, laufen und ist dank einer integrierten Batterie nicht an Kabel gebunden. Der nächste Versuchsaufbau hatte die Aufgabe, Roboter remote zu operieren. Dazu war ein Roboter in einer fiktiven Marsumgebung aufgestellt. In einer Aufgabenstellung wurde der Roboter vom Astronauten Alexander Gerst von der internationalen Raumstation ISS aus gesteuert, um diese Art der Steuerung zu testen. An der nächsten Station ging es um kooperatives Arbeiten zwischen Robotern und Menschen. Die Herausforderung in diesem Gebiet ist es, den Roboter „nachgiebig“ zu machen. Dazu verfügt „David“ über Federn in allen Gelenken sowie Sehnen, mit denen er seine Glieder anspannen kann. Eine weitere Forschungsstelle des RMC ist die Bedienung von Robotern, die sich im Weltraum befinden. Ein Forschungsgebiet ist hier vor allem die hohe Latenz zwischen Roboter und Mensch aufgrund der großen Entfernung. Anschließend beschäftigten wir uns mit einer Roboteranlage, die sich mit On-Orbit Servicing sowie dem De-Orbiting von unkooperativen Satelliten befasst. Als letztes ging es noch um die Flugrobotik. Hier liegt der Fokus besonders auf der Höhenforschung mit langen Flugzeiten (Stichwort Pseudosatellit). Als Teil des Projekts wird das Landen auf einem Fahrzeug erprobt, um das Fahrwerk einsparen zu können. Das erfordert natürlich eine entsprechende Regelung, die dies unter allen Umständen durchführen kann.
Wir wollen uns bei den Mitarbeitern am DLR danken, besonders Herrn Muskardin und Herrn Geiger für die Planung und Durchführung. Wir finden die Atmosphäre am DLR, die Begeisterung, mit der alle hier an ihren Projekten arbeiten und die sie uns vermitteln, immer wieder toll – wir kommen gerne wieder.
Comments are closed